
2024
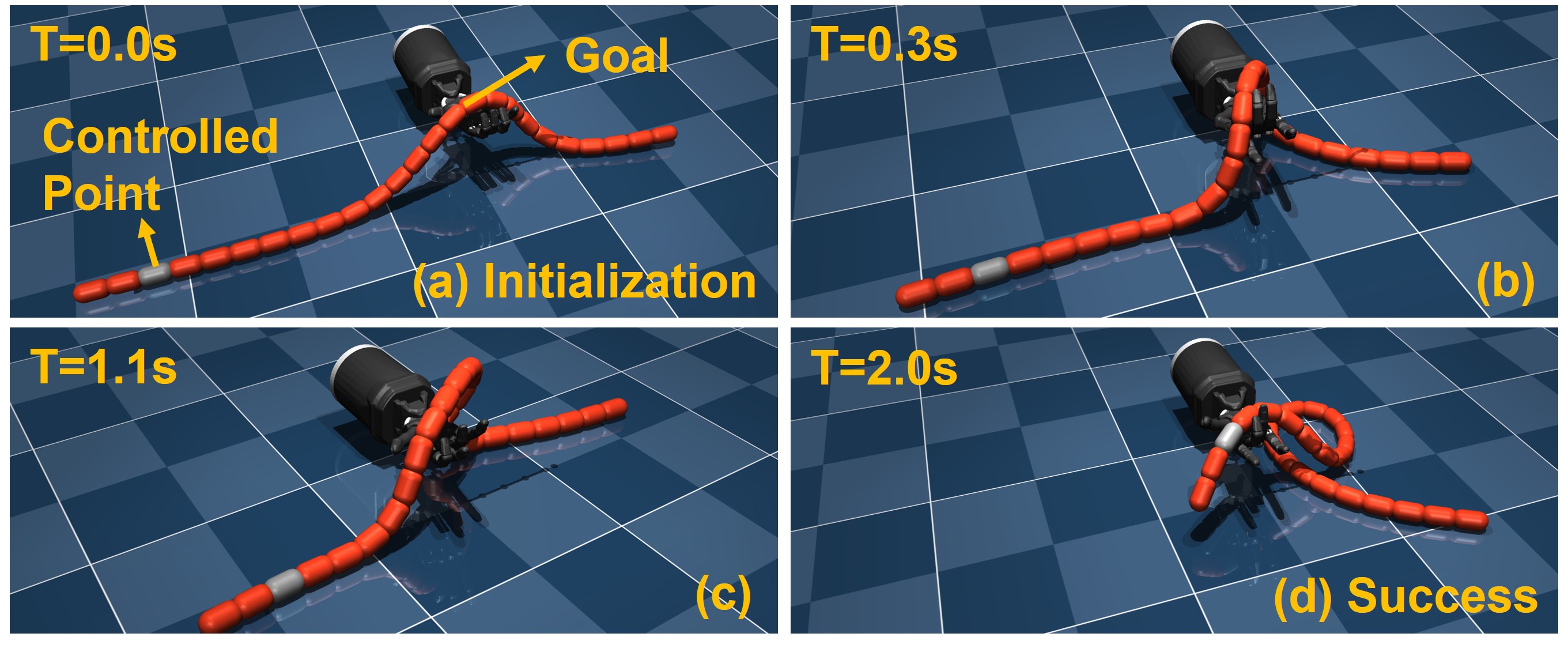
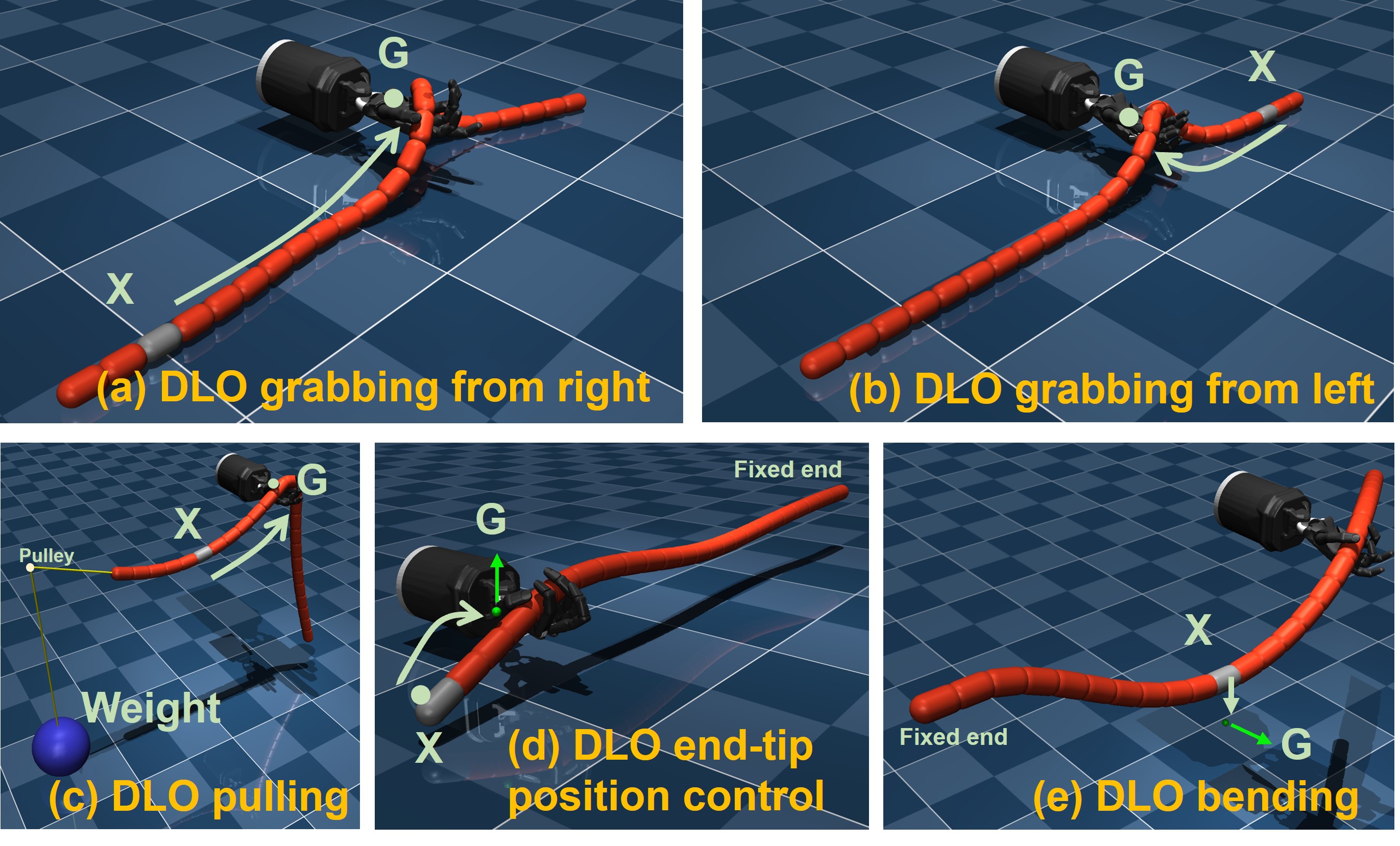
DexDLO: Learning Goal-Conditioned Dexterous Policy for Dynamic Manipulation of Deformable Linear Objects (ICRA2024) (Source codes will release soon)
Sun Zhaole, Jihong Zhu, Robert B. Fisher
Learning to use an anthropomorphic hand (a five-fingered hand) to manipulate deformable linear objects (ropes, cables, tubes, etc) in MuJoCo
2023
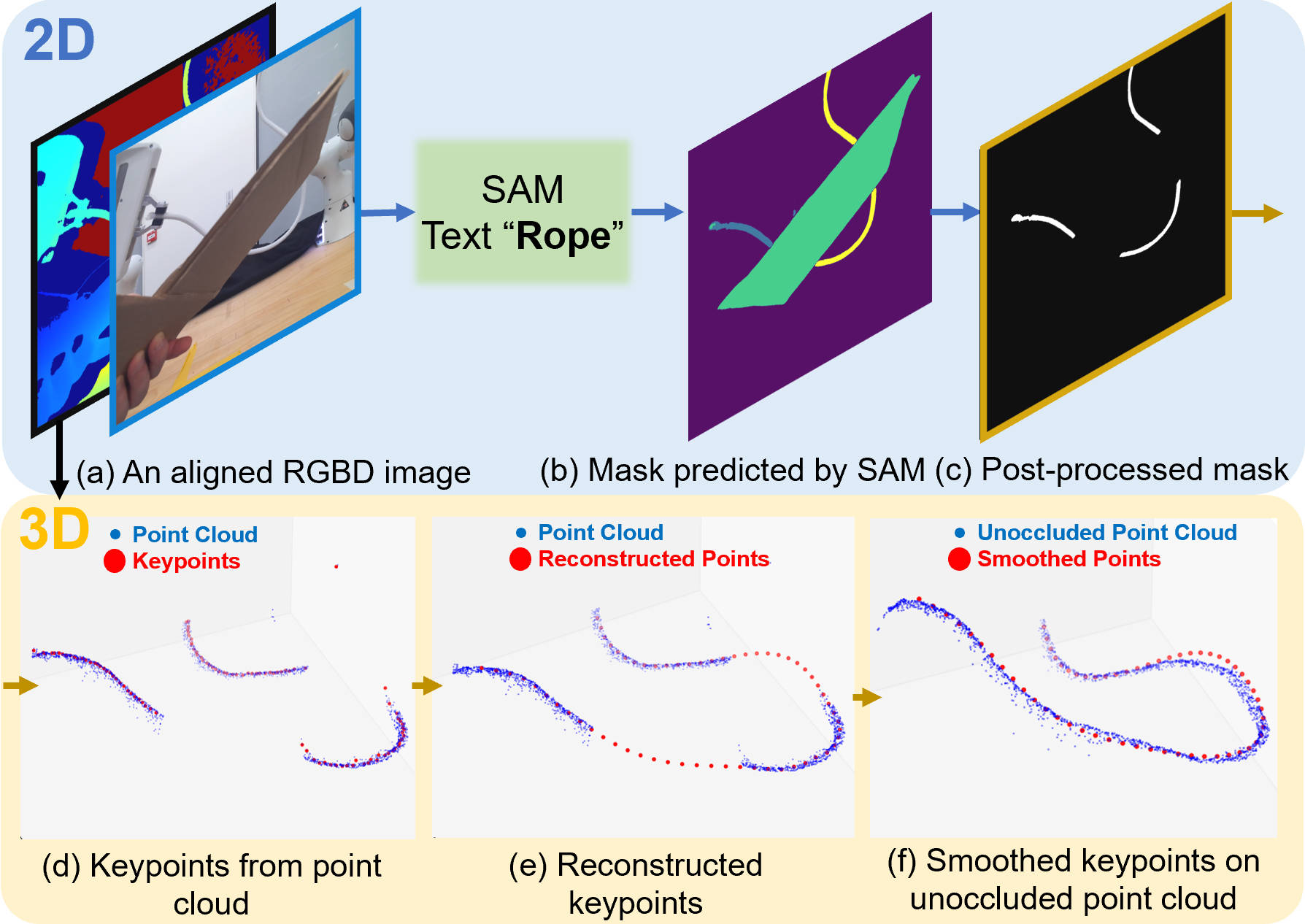
A Robust Deformable Linear Object Perception Pipeline in 3D: From Segmentation to Reconstruction (IEEE RA-L) Source code
Sun Zhaole, Hang Zhou, Li Nanbo, Longfei Chen, Jihong Zhu, Robert B. Fisher
A pipeline to segment, reconstruction, and physically smooth the 3D ropes with occlusions and self-intersections
2021
Object-centric representation learning with generative spatial-temporal factorization (Neurips2021)
Nanbo Li, Muhammad Ahmed Raza, Wenbin Hu, Sun Zhaole, Robert Fisher
2020
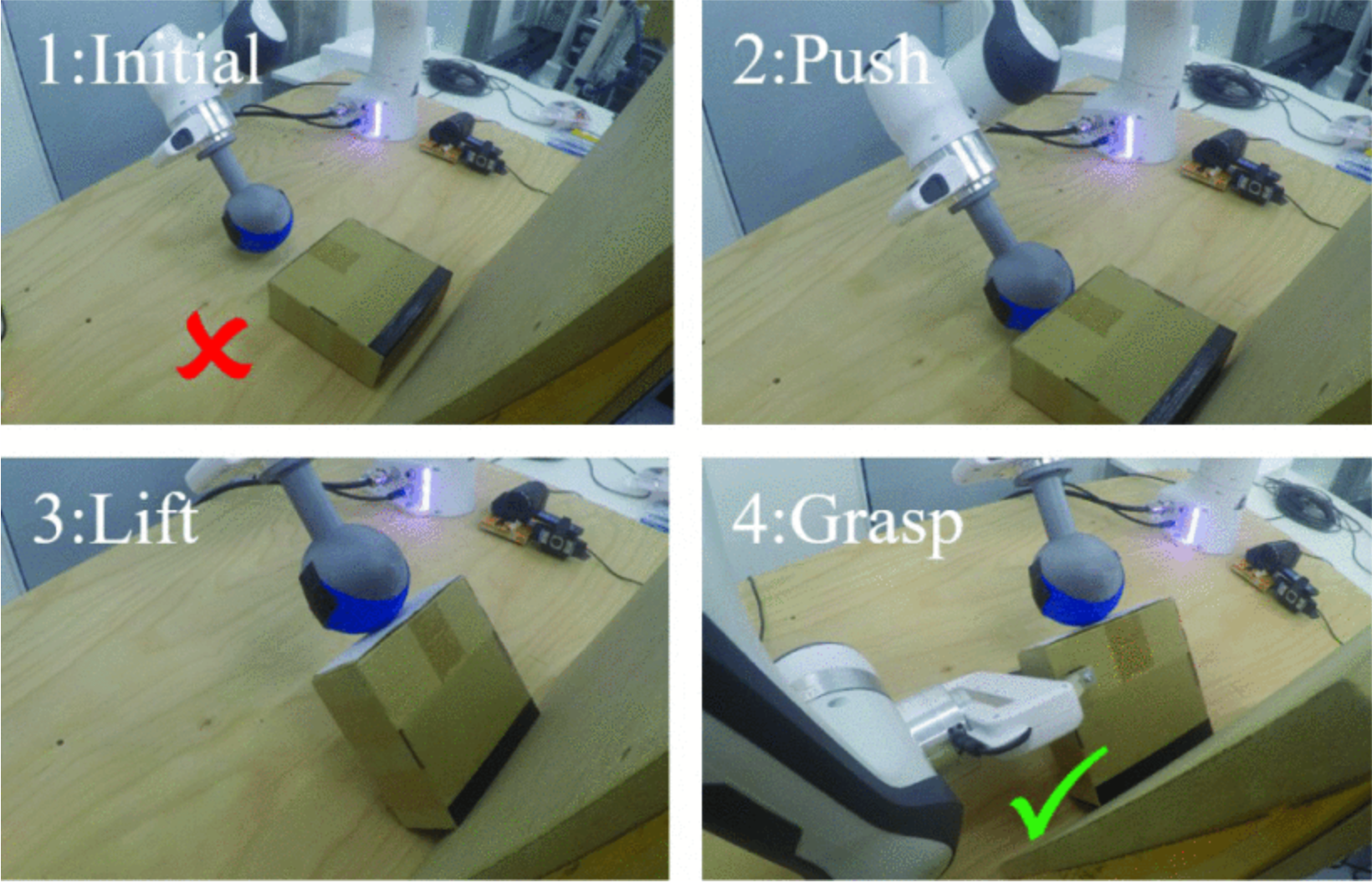
Learning Pregrasp Manipulation of Objects from Ungraspable Poses (ICRA2020)
Sun Zhaole, Kai Yuan, Wenbin Hu, Chuanyu Yang, Zhibin Li
Changing the object's pose to make them graspable
To see the 8-page version on Arxiv